Une prothèse de bras qui décode les mouvements du membre fantôme
Santé
Environ 75% des personnes amputées présentent une mobilité de leur membre fantôme. En se basant sur cette information, des chercheurs du CNRS, d’Aix-Marseille Université, et de Sorbonne Université, en collaboration avec des médecins1 , ont mis au point un prototype capable de détecter ces mouvements et d’actionner un bras prothétique. La prothèse ne nécessite aucune intervention chirurgicale et ne demande pas d’apprentissage aux patients. Les résultats sont publiés le 29 novembre 2018 dans la revue Frontiers in Bioengineering and Biotechnology.
- 1Institut des systèmes intelligents et robotiques (CNRS/Sorbonne Université), Institut des sciences du mouvements – Etienne-Jules Marey (CNRS/Aix-Marseille Université) et Institut régional de médecine physique et de réadaptation (UGECAM Nord-Est)
La plupart des personnes amputées perçoivent des sensations au niveau de leur membre disparu, d’où la dénomination de « membre fantôme ». Dans une étude précédente2 , les chercheurs avaient montré que plus de 75% des personnes amputées sont capables d’effectuer des mouvements volontaires avec leur membre fantôme. Or, l’exécution de ces mouvements "fantômes", comme par exemple la fermeture des doigts ou de la main, la rotation ou flexion du poignet, sont toujours associés à des contractions musculaires spécifiques au niveau du moignon. Chez les personnes amputées de bras au-dessus du coude, ces contractions impliquent des groupes musculaires qui n’ont aucun lien avec les articulations mobilisées avant l’amputation, comme si une réinnervation musculaire avait eu lieu de façon spontanée, sans chirurgie.
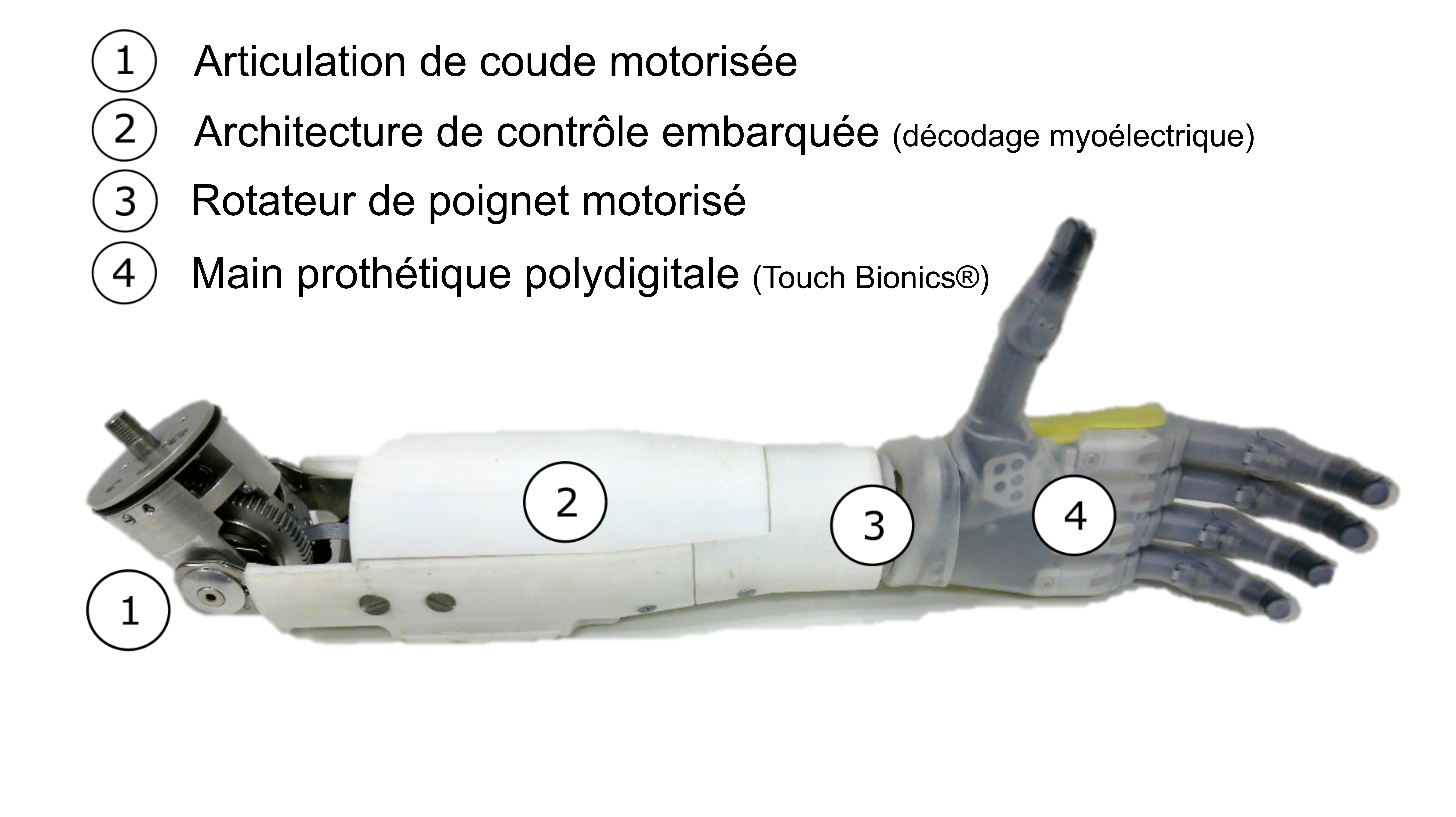
L’équipe de chercheurs a donc développé une approche de contrôle de prothèses naturel qui exploite ce phénomène. Pour le prototype mis au point, les chercheurs ont créé des algorithmes capables de reconnaître les activités musculaires générées par la mobilisation du fantôme et de reproduire le mouvement détecté avec la prothèse : un contrôle intuitif, sans apprentissage ni chirurgie.
Dans les tests mis en œuvre, deux participants amputés de bras ont utilisé ce type de contrôle pour actionner une prothèse non portée mais placée près de leur moignon de bras. Les résultats très encourageants montrent que les participants ont été capables de maîtriser la prothèse et de mener à bien l’exercice après seulement quelques minutes de familiarisation avec le système, malgré des temps d’action allongés. Cette recherche est très prometteuse, les personnes amputées du bras ayant souvent beaucoup de difficultés à contrôler efficacement leur prothèse, au point qu'un grand nombre d'entre elles finissent par l’abandonner.
Les chercheurs poursuivent leurs travaux en envisageant de passer à des tests de prothèses portées, tout en contribuant également à augmenter les connaissances sur le phénomène du membre fantôme dont les mécanismes ne sont pas encore parfaitement compris. A travers cette étude, les scientifiques montrent aussi la nécessité de reconsidérer le phénomène du membre fantôme, généralement tabou, souvent attribué au deuil du membre perdu et majoritairement considéré sous l’angle de la douleur.

© N. Jarrassé 2018
© E. Montalivet 2018.
Vidéo d’un des participant en situation d’expérience
- 2Characteristics of phantom upper limb mobility encourage phantom-mobility-based prosthesis control. Amélie Touillet, Laetitia Peultier-Celli, Caroline Nicol, Nathanaël Jarrassé, Isabelle Loiret, Noël Martinet, Jean Paysant & Jozina B. de Graaf. Scientific Reports, Vol 8, Iss 1, Pp 1-10 (2018) DOI: 10.1038/s41598-018-33643-0
Bibliographie
Phantom-mobility-based prosthesis control in transhumeral amputees without surgical reinnervation: a preliminary study. N. Jarrassé, E. De Montalivet, F. Richer, C. Nicol, A. Touillet, N. Martinet, J. Paysant and J.B. De Graaf. Frontiers in Bioengineering and Biotechnology, le 29 novembre 2018. DOI: 10.3389/fbioe.2018.00164